1. SPM/AFMとは?
表面組成分析
1.1. 概要
走査型プローブ顕微鏡(SPM:Scanning Probe Microscope)は、物質の表面を探針(プローブ)で走査し、ナノスケールで観察する顕微鏡の総称です。光学顕微鏡や電子顕微鏡では見ることが難しい、原子や分子の構造を直接観察・測定できます。具体的には、先端曲率半径が10 nm程度の微小な探針を試料表面に近づけて、探針ー試料間の力学的・電磁気的相互作用を検出しながら走査し、試料表面を三次元的に観察します。原子間力顕微鏡(AFM:Atomic Force Microscope)は、最も基本となるSPMの一種で、試料-探針間に働く力を検出することで表面形状を観察します。絶縁物試料も対象になり、大気中でも観察しやすいという特長があるため、一般にはAFMが広く使用されています。さらに、探針ー試料間に働く他の相互作用を同時検出することで、三次元形状と試料表面の各種物性を画像化できます。SPMは光学顕微鏡や電子顕微鏡と異なり、ビームやレンズによる倍率変化を使用しない顕微鏡ですが、観察条件によっては原子・分子を見分けることができ、分解能では走査型電子顕微鏡(SEM)を凌駕します。また、SEMでは観察が難しい絶縁物試料も大気中や溶液中で観察できる特長があります。
SPMは、1980年代に発明された歴史の新しい装置で、AFMは1986年に発明されています。今後もナノテクノロジーを始めとする各分野での研究開発や材料開発の必須ツールとして活用が期待されています。
1.2. 基本原理とわかること
SPMの最も基本となる原理はAFMです。SPM/AFMの基本構成を図1に示します。AFMではカンチレバーと呼ばれる、探針が形成された片持ち梁(梁の一方が固定され、他方が固定されていない梁)を力検出に使用します。カンチレバー先端の探針ー試料間に働く微小な力(原子間力)によってカンチレバーの反りや振動が変化します。その変化をカンチレバー背面に照射したレーザー光の反射により高感度に検出します。同時にカンチレバーまたは試料のいずれかをピエゾ素子を用いたスキャナにより三次元的に走査・制御されます。一般にカンチレバーは試料表面上(XY平面)を走査しつつ、反りが一定(コンタクトモード)、または振動が一定(ダイナミックモード)になるように試料からの距離(Z高さ)をフィードバック制御します。走査のそれぞれの位置(X・Y軸)に対応したZ軸のフィードバック量(スキャナへの出力電圧)を取り込み、三次元画像表示することで、試料表面の三次元形状像が得られます。形状像は、濃淡表示や疑似カラーで表現され、ソフトウェアで任意の断面形状を解析したり、面の粗さ解析を行うことができます。島津SPM/AFMでは、基本となる表面形状像と同時に、電流、表面電位、弾性率や吸着力などの物性情報を取得できます。
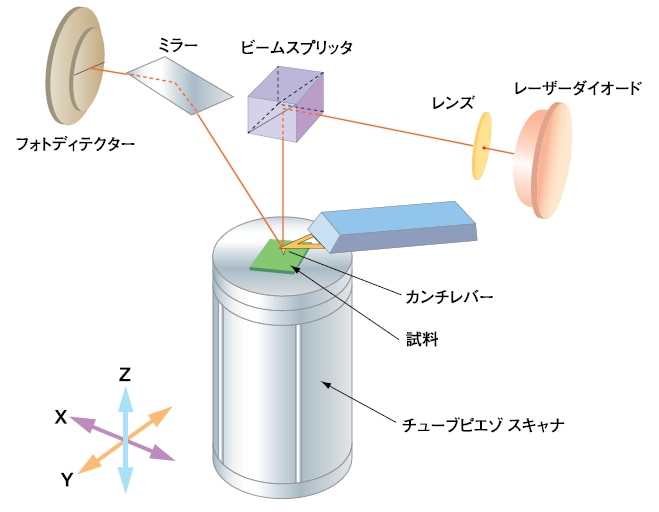
図1-1 SPM/AFMの基本構成
1.3. 観察モード
AFMの動作モードは、XY方向に走査するモードとして、コンタクトモード(DCモード・静的モード)と、ダイナミックモード(ACモード・動的モード)に大別されます。これに加えて三次元的に走査するフォースカーブ測定があります。各観察モードの比較表を表1-1に示します。
◆コンタクトモード
カンチレバーの反り具合から静的な原子間力を検出します。カンチレバーを試料表面に近づけると、微小な斥力によって、カンチレバーがたわみます。その斥力が一定、すなわちカンチレバーのたわみ(反り具合)が一定になるようにフィードバック制御を行い、そのフィードバック量を取り込んで表面形状を画像化します。原理がシンプルで、分解能が高いため、原子・分子レベルの観察は、このモードで行うのが一般的です。大気中コンタクトモードでの観察中は、探針が試料表面の吸着水膜(コンタミ層)に浸かっている状態で走査しています。このため、カンチレバーは試料からの斥力以外に凝着力(メニスカスフォース)の影響を受け、横に引きずり線のようなノイズが入った画像が得られる場合があります。このため、動きやすい試料ややわらかい表面の観察には不向きです。
◆ダイナミックモード
カンチレバーに縦方向の励振を加え、共振周波数付近で振動させます。この状態でカンチレバー先端の探針が試料に接近すると、振幅が変化します。この現象を利用して振動振幅が一定になるようにフィードバック制御を行います。走査時の試料への荷重が少ないため、試料へのダメージが抑えられます。また、断続的に試料をたたくため、水平方向への引っかきが少なく、動きやすい試料や吸着性のある試料に向いています。また、ダイナミックモード用カンチレバーはコンタクトモード用と比べてバネ定数が大きく硬いため、静電気の影響も受けにくくなっています。位相モードを使用すれば、表面形状像と同時に位相像が得られます。AFMでは最も標準的なモードです。
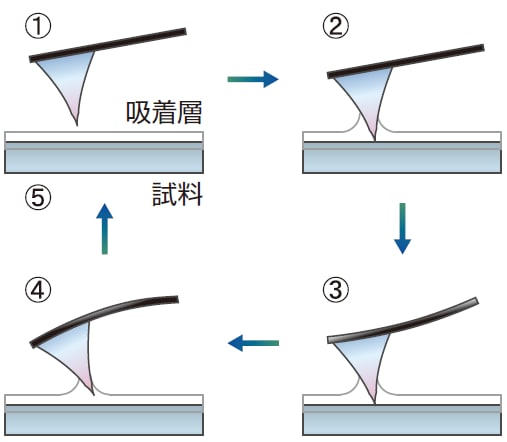
◆フォースカーブ測定
カンチレバーを試料近傍で垂直方向にスイープさせ、探針と試料表面との距離を変えながら、探針に働く微小な力を測定することで表面の弾性率や吸着力といった機械特性を評価できます。フォースカーブ測定を任意の視野および測定点数(画素数)で実施することで、力の高さ方向分布を可視化し、三次元でのナノ力学解析も可能です。ナノインデンターでは測定困難な薄膜や、数kPa~1GPa程度のやわらかい材料の機械特性評価に威力を発揮します。
表1-1 観察モード
| コンタクトモード | ダイナミックモード | フォースカーブ測定 | |
|---|---|---|---|
| 走査方法 | 探針と試料との間に働く斥力が一定になるように走査します。
 |
カンチレバーを共振周波数付近で振動させ、探針が試料に接近すると振幅が変化します。これを利用して振幅が一定になるように走査します。
 |
探針と試料表面との距離を変化させながら、カンチレバーに働く力を測定します。
 |
| 物性情報 | 電流 水平力 | 位相 表面電位 磁気力 | 弾性率 吸着力 |
| 観察に適した試料 | 硬いもの:金属など | やわらかいもの:高分子など | やわらかいもの:高分子や生体など 凹凸が数um以上のもの |
1.4. 分解能
SPM/AFMの分解能の定義は、他の顕微鏡で一般的な「空間分解能」(例えば二点識別分解能)とは異なります。その理由は、原子や分子サイズ以下の寸法を正確に測定するための標準的な規準試料が存在しないためです。そのため、SPM/AFMの分解能を表現する際には、学術的に「Atomic Resolution(原子分解能)」という表現が好まれます。SPMの空間分解能を議論する場合、以下の3つの観点に分けて考える必要があります。
◆理論分解能
装置や測定原理によって決まる、理論的に達成可能な分解能を指します。多くのSPMでは、公称分解能として「水平(XY方向):0.2 nm、垂直(Z方向):0.01 nm」と標榜されていますが、これは理論的な値であり、実際の観察結果とは異なる場合があります。SPM/AFMでは、探針の先端が理想的に鋭ければ原子分解能が理論的に可能ですが、現実には探針先端径や、探針と試料表面との相互作用の物理的限界が影響します。
参考:導出過程
It ∝ exp(-Z/L)という仮定をします。
ここで It:検出物理量、Z:プローブ先端から試料表面までの距離、L:減衰距離
この仮定のもとで、面内分解能をδx、高さ分解能をδz、nをSignal to Background ratioとすると
δz =L/n,δx =√{δz(2Z+ΔZ)}
ここで一般的な数値として、Z=1 nm、L(減衰距離)=0.05 nm、n=5を代入し、探針尖端の曲率半径を十分小さいと仮定すると
δx=0.2 nm δz=0.01 nmという理論分解能が得られます。
出典:原子・分子のナノカ学 森田 清三 編著 丸善
◆制御分解能
探針や試料を動かす制御系(スキャナ、電子回路など)の精度や安定性に基づく分解能を指します。具体的には、制御系が実際に動かせる最小ステップ(1bit当たりの最小駆動幅)や検出できる最小変位を指し、スキャナの走査範囲とデジタル制御の精度(ビット数)によって決まります。スキャナは、理論的には非常に細かいステップで動かせますが、ノイズやドリフト、ヒステリシスなどの制御系の限界で、実際には数pm〜サブnm程度が限界です。原子分解能を達成する上では、測定系のノイズレベルが十分に小さいことが必須となります。
例:島津SPM/AFMの制御分解能
・Z軸(高さ方向)制御電圧分解能:26bit
・XY軸(平面方向)制御電圧分解能:16bit
HTスキャナ(最大走査範囲:XY 10 µm×10 µm、Z 1 µm)を使用した場合
・XY軸分解能:0.153 nm(平面方向での最小駆動幅)
・Z軸分解能:0.000015 nm(高さ方向での最小駆動幅)
これらの数値は理論上の制御分解能を示しており、装置の性能を評価する際の指標となります。
海外メーカーなどでは、制御分解能を「装置分解能」としている場合がありますが、制御分解能はあくまで理論的な値であり、実際の観察結果における分解能とは異なることに注意が必要です。
◆画像分解能
実際にSPM/AFMで取得される画像で区別できる最小の構造サイズを指します。これは理論分解能や制御分解能に加え、観察条件(走査範囲、走査速度、画素数など)や探針・試料の状態にも大きく依存するため、画像数が粗ければ、どれだけ理論分解能や制御分解能が高くても、画像分解能は制限されます。実際の画像では、数ナノnm〜サブnmの分解能が一般的ですが、原子分解能画像も条件によっては得られます。
例:観察視野 1 µm×1 µmで画素数 256×256の場合、1画素あたりの画像分解能:3.9 nm
観察視野 100 µm×100 µmで画素数 512×512の場合、1画素あたりの画像分解能:195 nm
1.5. 観察視野・倍率
SPM/AFMの観察視野・倍率は、各顕微鏡の中では最も高分解能な位置づけになります。図1-2に各顕微鏡の観察視野と倍率を示します。
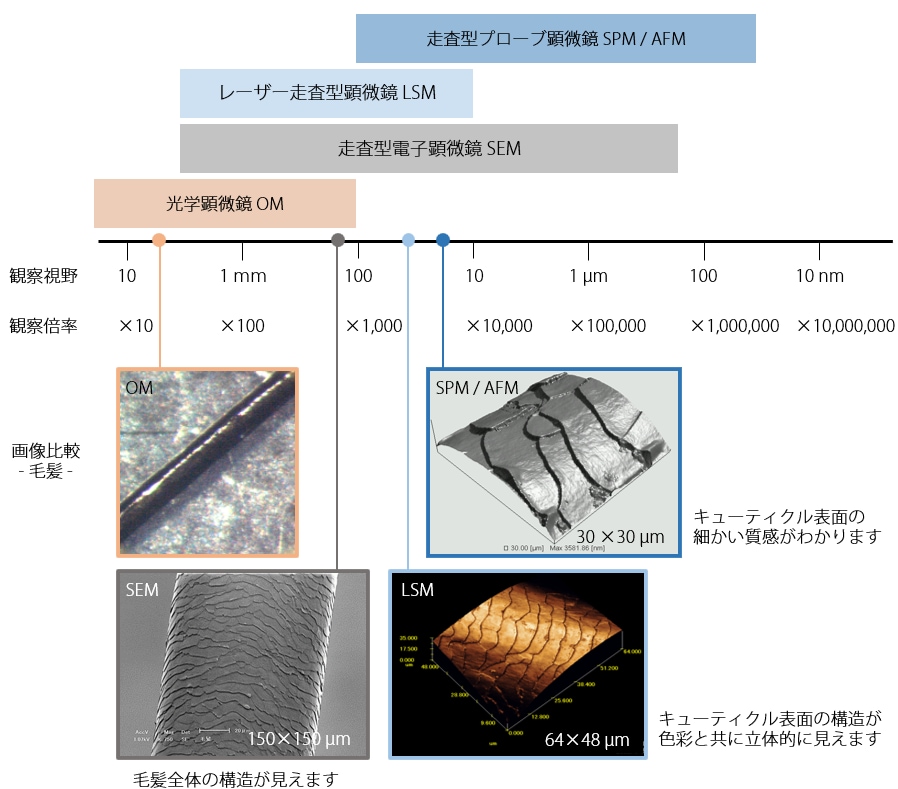
図1-2 各顕微鏡の観察視野と倍率
◆観察視野
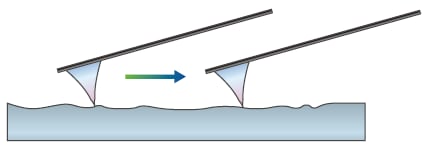
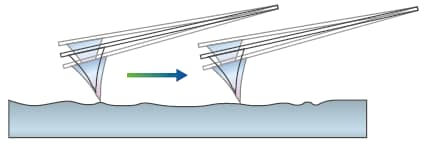
SPM/AFMの観察視野は、試料やカンチレバーをXY平面内で走査するスキャナの駆動範囲によって決まります。一般的に市販のSPM/AFMではユーザーによるスキャナ交換が可能で、使用するスキャナによって走査範囲(観察範囲)が異なります。島津SPM/AFMではオプションを含めて5種類のスキャナが使用可能です。最も一般的なスキャナの最大走査範囲は10 µm×10 µmであり、垂直方向(高さ方向)の可動範囲は1 µmです。一方、広い視野が必要な場合には広域走査用スキャナを使用することで、最大走査範囲を125 µm×125 µmまで拡張でき、垂直方向の可動範囲も最大7 µmとなります。ただし、カンチレバー先端の探針部分の高さは通常数µm程度であり、根元に近づくほど太くなる形状をしているため、深さが数µmを超える穴の底を観察するには適していません。例えば、図1-3に示されるようなアスペクト比(断面構造の横幅と高さの比)が大きい細い溝や深い穴の場合、探針が底部に届かず、画像にアーティファクト(観察の誤差や歪み)が生じることがあります。一般的に、試料の高さ方向の観察範囲は数µmまでが現実的であることに留意する必要があります。
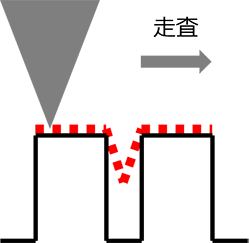
図1-3 アスペクト比の大きい試料表面を探針で走査した際の軌跡
◆観察倍率
観察倍率は、出力表示上の長さ ÷ 試料上の長さで計算されます。例えば、試料上で125 µmの長さをPCモニタ上で125 mmに表示した場合、倍率は、125 mm ÷ 125 µm = 1000倍 と計算されます。走査範囲を小さくすることで倍率を上げることになります。ただし、ソフトウェア上では非常に小さい走査範囲を設定することで、理論上の高倍率を表示することも可能です。例えば、走査範囲を0.1 nmに設定し、それをモニタ上で125 mmに表示した場合、計算上の倍率は、125 mm ÷ 0.1 nm = 12億5000万倍 となります。しかし、これはあくまで計算上の数字であり、実際の観察では意味を持ちません。顕微鏡において重要なのは分解能であり、倍率をいたずらに高くしても、ぼやけた像になってしまいます。一般的な用途では、最小の実用的な走査範囲は約100 nmです。この場合、倍率は、125 mm ÷ 100 nm = 125万倍 となります。一方、原子や分子を研究する最先端の応用や、超高真空環境での使用など特殊な条件下では、さらに小さい走査範囲が使用されることもあります。
SPMはデジタル信号でデータを取り込むため、従来のアナログ写真のように「原版倍率」の概念はありません。そのため、倍率で表すよりも、走査範囲で表示する方が一般的です。これにより、観察対象の大きさや範囲をより正確に把握することができます。
表1-2にSPM/AFMでできることを高分解能な顕微鏡の1つである走査型電子顕微鏡(SEM)と比較して示します。SPM/AFMは、SEMで実施できる元素分析は実施できませんが、微小領域の観察や物性測定を簡便に実施できる強力な手段です。
表1-2 SEMとSPM/AFMの比較
| SEM | SPM/AFM | ||
|---|---|---|---|
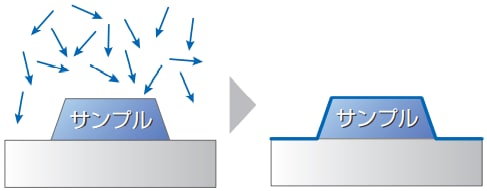 |
真空引きや試料前処理が必要… |  |
真空引き・試料前処理不要 絶縁材料もそのまま測定できます |
 |
3D形状が測定できない… | 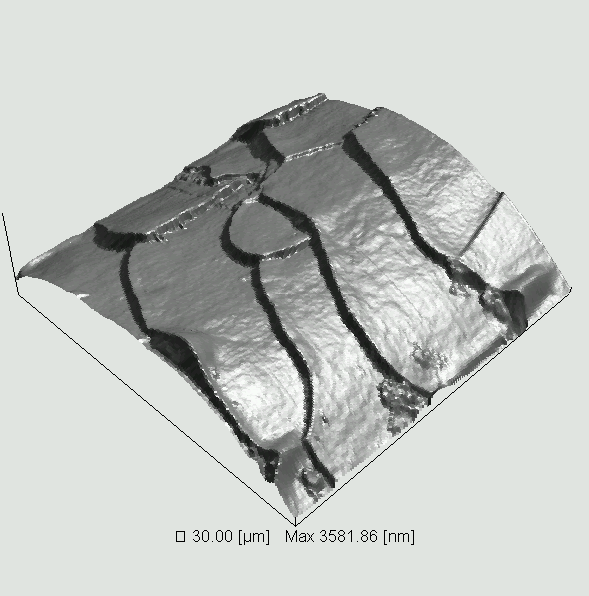 |
超高分解能※で3D測定ができます ※ Z 0.01 nm, XY 0.2 nm |
 |
観察パラメータの調整が大変… |  |
自動観察機能で簡単に測定ができます |
| 物性測定や解析ができない… | 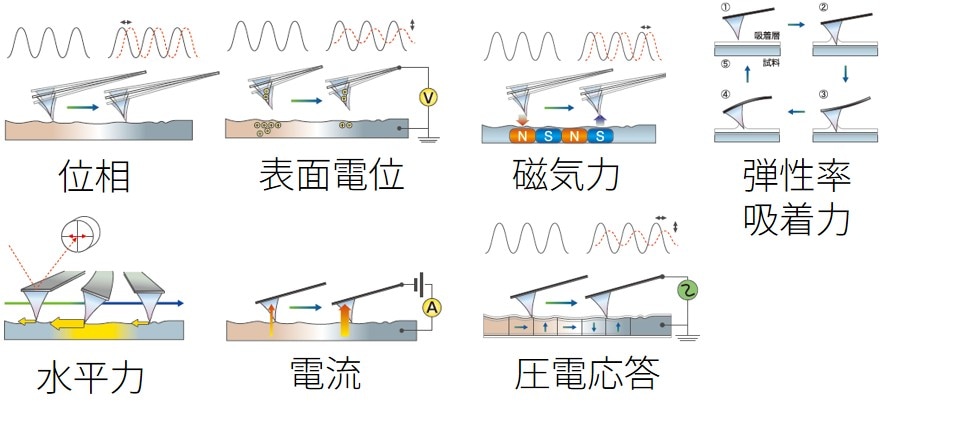 |
各種物性測定ができます | |
| 液中測定ができない… | 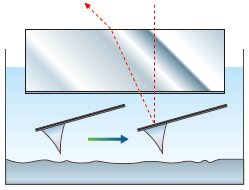 |
大気中・液中・ガス 雰囲気中測定ができます |
|
1.6. 観察における留意点
SPM/AFMは固体試料の表面に対して大気中、液中、ガス雰囲気中、加熱環境下で観察が可能です。SPMが発揮できる性能(分解能、再現性、凹凸以外の信号取得)は、試料の性質、観察面の状態、試料固定方法、観察雰囲気、カンチレバーの種類・個体差などによって大きく左右されます。
◆試料
平滑で安定した表面であることが理想的です。試料ホルダにそのままセットすることが難しい場合は、ガラス、マイカ、シリコンウエハなどを基板として、その上に試料を固定します。固定した試料の観察面がほぼ水平になっていることが望ましいです。特に粉体のような微小な試料の固定方法、断面を見たいときの割断方法、生体試料のようなやわらかい対象物の固定には多くのノウハウが必要です。
以下のような試料は、観察が不可能になることや、得られた像にアーティファクトが含まれる可能性があるため、注意が必要です。
- 表面の経時変化が速い試料:観察開始時と終了時とで得られる画像が異なることがあります
- 固定されていない試料:生体試料や粉末は固定されていないと走査で動いてしまうことがあります
- 浮いている部分がある試料:試料の根元が固定されていても、上部が浮いている場合は観察が困難です
- アスペクト比が大きい表面:狭くて深い溝や穴の底などは、探針が届かず、観察できない場合があります
- 表面の凹凸が大きい試料:数μmを超える凹凸は走査が困難になります
◆試料のセット
試料ホルダ(一般にΦ10~20 mm)から試料がなるべくはみ出さないようにセットする必要があります。試料の高さは一般に数~10 mm程度に収める必要があります。走査箇所は、カンチレバー先端の探針の位置であるため、試料ホルダの端の部分は観察できない場合が多いため、観察箇所を試料ホルダの中央付近に位置決めすることが重要です。